海洋数字与智能技术实验室
海洋数字与智能技术实验室
海洋数字运载器 本项目发起于2021年,致力于仿照物理世界海洋运载器,采用仿真建模、数字孪生等相关技术,构建数字化的海洋运载器,实现运载平台、控制系统、导航系统、探测系统、通信系统的孪生和互连,对外提供视景展示、交互操作和SDK接口访问,为海洋运载器相关的技术开发、方法验证、作业训练、过程调度、系统推演等提供支持。
赞助商:零维数智 主要完成人:张振兴、张兵、刘伟等   海洋数字环境场 本项目发起于2021年,致力于采用数值分析、机理建模、特征分析等方式,构建海洋数字环境场,实现全球海洋水文和海面大气要素的历史数据支持、机理数据生成、智能分析预报。对外提供视景展示、交互操作、数据访问和SDK接口访问,为海洋装置开发和应用的相关研究提供海洋数字环境场支持。
赞助商:零维数智 主要完成人:张振兴、张兵、刘伟等  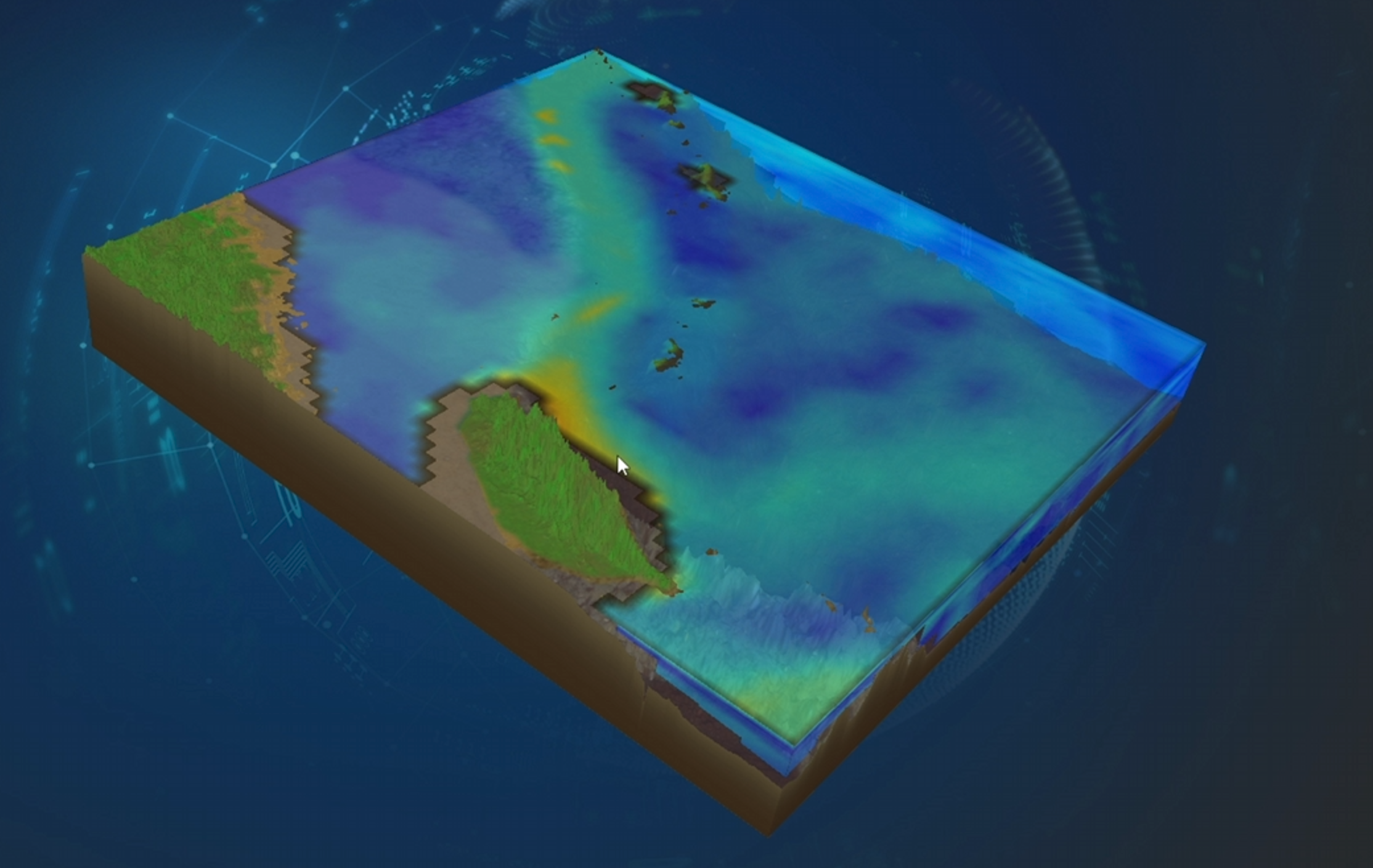 全空间信息可视化平台 全空间信息可视化平台致力于将海洋实时数据处理技术和GIS技术深度融合,实现从二维平面到三维空间的飞跃。通过模拟真实地理、海洋、电磁等环境和动态目标,使得在设定场景下的环境、目标、相对态势、任务决策分析和展示得以实现。全空间信息可视化平台适配主流的软、硬件环境,已经在多家科研单位部署,在海洋地理信息研究、海洋环境分析预报、船舶航行可视化展示、海上任务推演和可视化展示等领域得到应用。
赞助商:哈船数智 主要完成人:李刚、张靖靖、王瑞等 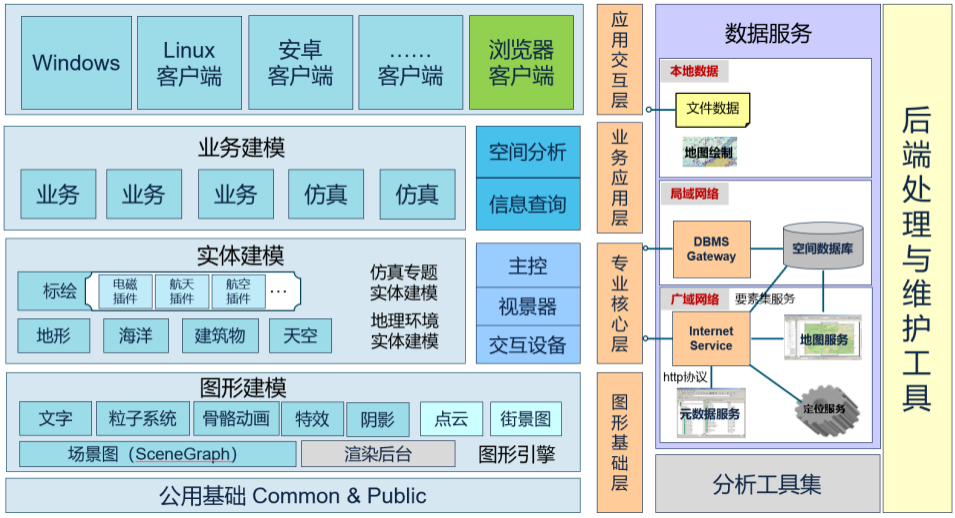 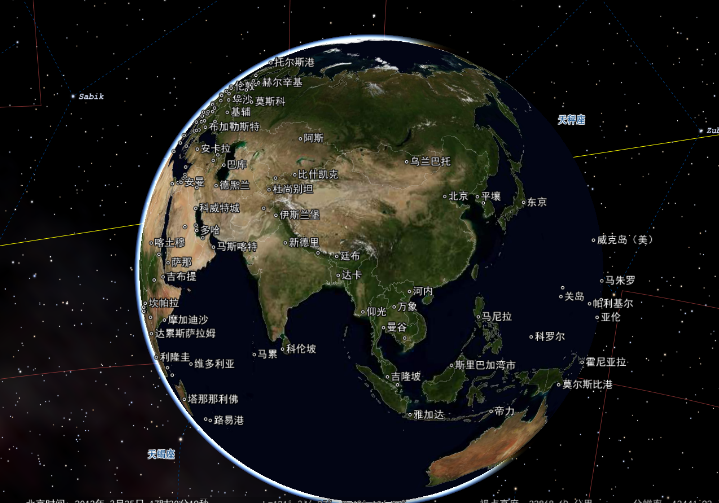 开源AUV平台 本项目发起于2024年,致力于开发一款成本低廉、结构小巧、使用便捷的开源AUV平台,为AUV相关的教学和科研提供支持。该平台采用树莓派与飞控组合的主控解决方案,配备避障声呐、水下摄像机、深度计、GPS、数传电台、QGC地面站、遥控手柄等,可选配边缘计算机,提供AI支持。本平台已在AUV自主控制、障碍识别、自主避障等多项科研中得到使用。
赞助商:零维数智、哈船导航 主要完成人:张振兴、韦金辰、张兵等  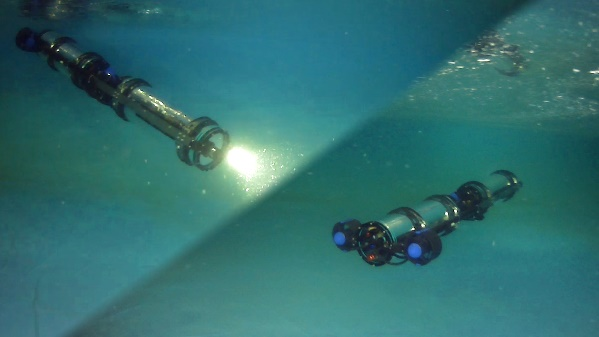  |