海洋数字与智能技术实验室
海洋数字与智能技术实验室
船海数字仿真系统 海洋三维视景场构建 船舶作业训练仿真系统 导航设备信息模拟系统 智能避碰决策演示验证系统 开源AUV平台 集群智能控制技术演示验证 |
船海数字仿真系统
本项目发起于2022年,基于海洋数字运载器平台和海洋数字环境场平台,构建了船海数字仿真系统。该系统可根据需求设定海洋数字环境场,布放各型任意数量的数字运载器,从而创建用户所需的任务场景,并可在海洋环境场的环境背景作用下,通过操控海洋运载器的各大系统,从而驱动海洋运载器产生行为动作。本项目致力于为海洋运载器相关的技术开发、方法验证、作业训练、过程调度、系统推演等提供支持,并已经在多项科研中得到使用。
赞助商:零维数智
主要完成人:张振兴、张兵、刘伟等


海洋三维视景场构建
本项目发起于2022年,致力于为船海数字仿真提供逼真的3D视景场呈现,实现了海洋运载器航行相关的地理环境、海洋环境、大气环境、运载器本体及其他对象的多视角3D可视化交互显示。可模拟海上各种典型天气现象(云、雨、雪、雾等并配有相应声效),可呈现逼真的24小时连续变化的动态天空穹顶、昼夜循环、现实天气、动态云和基于物理的大气散射模拟,可实现逼真的海浪和海冰效果,实现了15个典型港口和30型海洋运载器,并支持扩展。
赞助商:零维数智
主要完成人:张振兴、张兵、刘伟、杨达等


船舶作业训练仿真系统
本项目发起于2022年,在船海数字仿真系统基础上,针对海洋运载器上的具体作业部位,通过构建物理的作业控制台,以及开发相应的作业交互系统和三维视景系统,为作业训练对象提供一个沉浸式的逼真体验环境,获得和在实船作业近似的体验。本项目已经完成了船舶操纵控制作业训练、动力定位(DP)作业训练和水下运载器潜操作业训练的系统开发。

赞助商:零维数智,哈船导航
主要完成人:张振兴、韦金辰、张兵、刘伟、张彤等
海洋运载器导航设备信息模拟系统
本项目发起于2023年,在船海数字仿真系统基础上,通过增加相应的接口转换设备,实现将船海数字仿真系统内的海洋运载器导航设备信息转换为符合外部设备需求的以太网、CAN、1553B、RS422、RS485、RS232等电气接口的信息,并按照外部设备的协议格式要求输出,从而驱动外部设备在船海数字仿真系统预设的任务场景下运转,实现对外部设备的试验测试。

赞助商:零维数智,哈船导航
主要完成人:张振兴、张兵、刘长明、张彤、张芹治等
船舶智能避碰决策演示验证系统
本项目发起于2023年,致力于采用全数字驱动方式,针对海洋运载器在多船会遇态势下,智能识别、多源融合和避障决策等相关方法和策略的研究提供仿真评估和演示验证。
该项目在船海数字仿真系统基础上开发,实现了会遇态势场景构建,实现了符合船舶相关规范的罗经、计程仪、IMU、GNSS、导航雷达、AIS等传感器数字接口信息生成,实现了可见光和红外视觉视频流信息生成,实现了基于AI算法、DWA算法、APF算法、RRT算法相的智能避碰决策。
赞助商:零维数智
主要完成人:张振兴、张兵、刘伟、付正宇、李介华等


开源AUV平台
本项目发起于2024年,致力于开发一款成本低廉、结构小巧、使用便捷的开源AUV平台,为AUV相关的教学和科研提供支持。该平台采用树莓派与飞控组合的主控解决方案,配备避障声呐、水下摄像机、深度计、GPS、数传电台、QGC地面站、遥控手柄等,可选配边缘计算机,提供AI支持。本平台已在AUV自主控制、障碍识别、自主避障等多项科研中得到使用。
| 物理尺寸 | 长度1050mm,直径130mm |
| 重量 | 约12kg |
| 工作深度 | 0-30m |
| 最大速度 | 2m/s |
| 最大续航 | 8h |
赞助商:零维数智、哈船导航
主要完成人:张振兴、韦金辰、张兵等


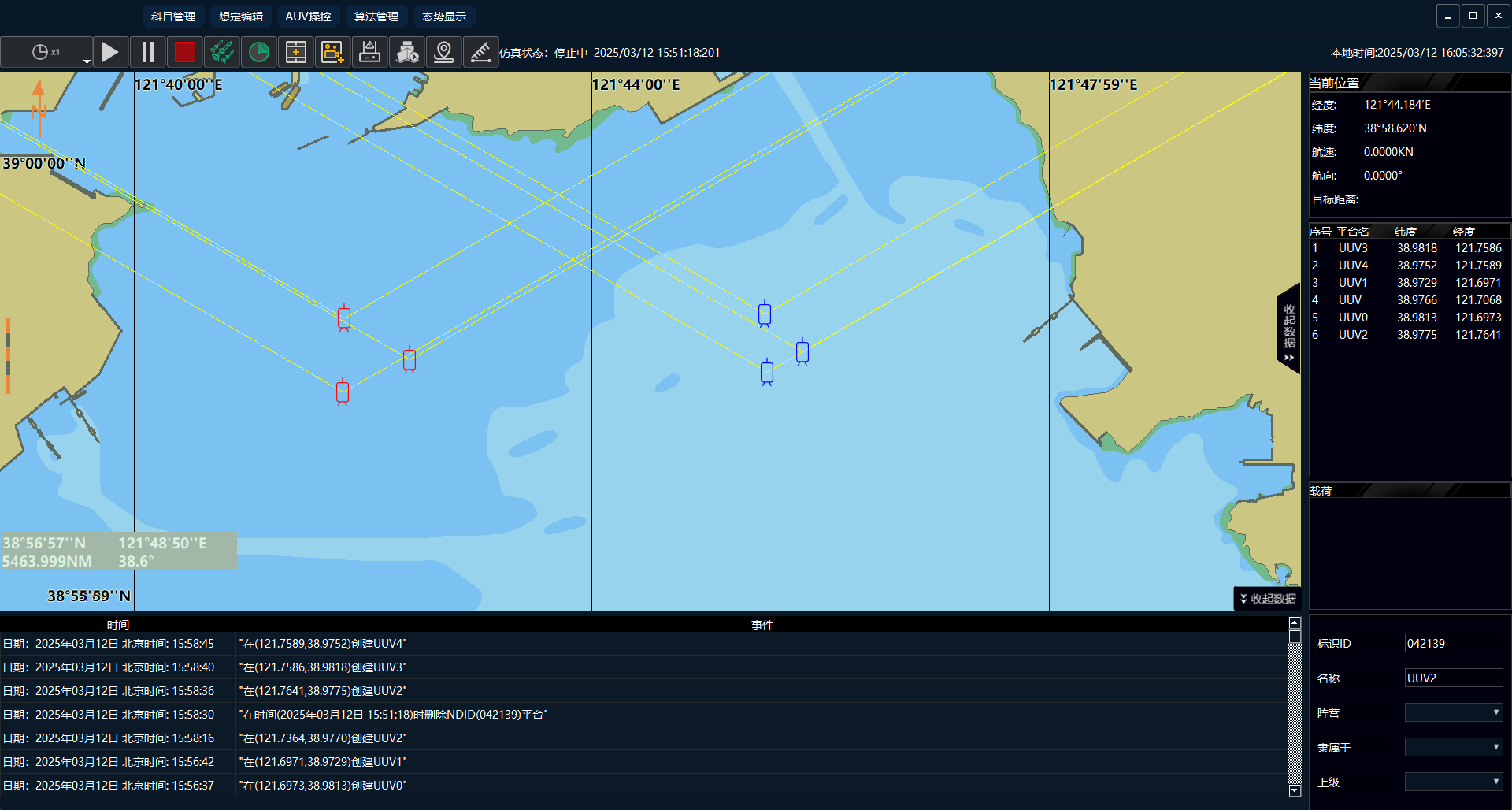
AUV集群智能控制技术演示验证
AUV由于其自主性强、环境适应性佳、可部署性和费效比高等特点,已经越来越得到海洋从业者的重视,逐渐在海底勘探、水下救援、海底打捞、海洋科考和军事应用等领域被广泛应用。然而单体AUV的工作半径和工作效率都有限,AUV集群作业成为提升工作效率的有效手段。本项目致力于通过构造水下复杂环境、AUV载体平台、AUV作业工况、集群作业场景等,为AUV集群智能控制相关算法的设计、开发、评估和演示验证提供支持。
赞助商:哈船数智
主要完成人:李刚、张靖靖、王瑞等
|
|